Forefeel the Move: Investigating Proprioceptive Feedback for Communicating Imminent Motions of Body-actuating Systems Abstract Systems actuating the body can proactively assist users in diverse tasks. However, unexpected body actuation may pose safety risks. We propose proprioceptive feedback to inform users about an imminent actuation before the system takes control. In a user study, we compare different proprioceptive cues that either interrupt or augment user motion […]
Posted: 23/02/2026
Under:
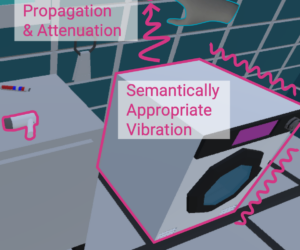
Scene2Hap: Generating Scene-Wide Haptics for VR from Scene Context with Multimodal LLMs Abstract Haptic feedback contributes to immersive virtual reality (VR) experiences. However, designing such feedback at scale for all objects within a VR scene remains time-consuming. We present Scene2Hap, an LLM-centered system that automatically designs object-level vibrotactile feedback for entire VR scenes based on the objects’ semantic attributes and physical context. Scene2Hap employs a […]
Posted: 09/02/2026
Under:
HaptEx: Investigating Haptic Notification Channels for Exoskeletons Across Different Levels of Actuation Abstract Exoskeletons are increasingly deployed in real-world contexts, where communicating critical system states or unexpected events is important for effective interaction. Haptic feedback offers a direct communication channel, integrating naturally with the actuated body region. Yet, it remains unclear how well haptic feedback is perceived while the body is being actuated. In a […]
Posted: 02/02/2026
Under:
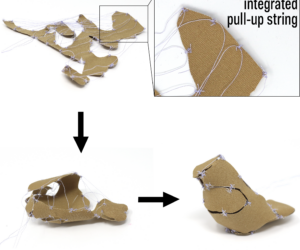
EmbroForm: Digital Fabrication of Soft Freeform Objects with Machine Embroidered Pull-up Strings Abstract Pull-up objects form 3D shapes by pulling a string routed through a 2D material, offering low-cost 2D fabrication and reversible transformation. However, existing approaches rely on origamic folding, which creates faceted, oftentimes rigid surfaces and requires manual pull-up string routing. We introduce EmbroForm, a digital fabrication pipeline for fully soft pull-up objects […]
Posted: 02/02/2026
Under:
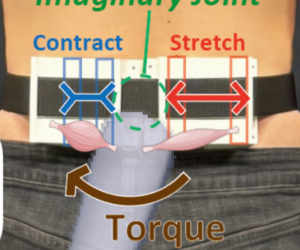
Imaginary Joint: Proprioceptive Feedback for Virtual Body Extensions via Skin Stretch Abstract Virtual body extensions such as a wing or tail have the potential to offer users new bodily experiences and capabilities in virtual and augmented reality. To use these extensions as naturally as one’s own body—particularly for body parts that are normally hard to see, such as a tail—it is essential to provide proprioceptive […]
Posted: 19/08/2025
Under:
Move with Style! Enhancing Avatar Embodiment in Virtual Reality through Proprioceptive Motion Feedback Abstract In virtual reality (VR), users slip into a variety of roles, represented by a rich diversity of avatars that each exhibit specific visual attributes and motionstyles. While users can see their avatar’s motion in VR, they usually cannot feel it. To enhance avatar embodiment, we propose active proprioceptive feedback that aligns […]
Posted: 12/08/2025
Under:
GestureCoach: Rehearsing for Engaging Talks with LLM-Driven Gesture Recommendations Abstract This paper introduces GestureCoach, a system designed to help speakers deliver more engaging talks by guiding them to gesture effectively during rehearsal. GestureCoach combines an LLM-driven gesture recommendation model with a rehearsal interface that proactively cues speakers to gesture appropriately. Trained on experts’ gesturing patterns from TED talks, the model consists of two modules: an […]
Posted: 12/08/2025
Under:
Texergy: Textile-based Harvesting, Storing, and Releasing of Mechanical Energy for Passive On-Body Actuation Abstract Humans instinctively manipulate and “actuate” their clothing, for instance, to adapt to the environment or to modify aesthetics. However, such manual actuation remains in exible and directly tied to user action. We introduce Texergy, a textile-based technical framework that decouples user input and actuated output to make passive on-body actuation interactive […]
Posted: 12/08/2025
Under:
ExoKit: A Toolkit for Rapid Prototyping of Interactions for Arm-based Exoskeletons Exoskeletons open up a unique interaction space that seamlessly integrates users’ body movements with robotic actuation. Despite its potential, human-exoskeleton interaction remains an underexplored area in HCI, largely due to the lack of accessible prototyping tools that enable designers to easily develop exoskeleton designs and customized interactive behaviors. We present ExoKit, a do-it-yourself toolkit […]
Posted: 14/02/2025
Under:
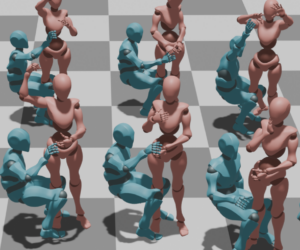
3HANDS Dataset: Learning from Humans for Generating Naturalistic Handovers with Supernumerary Robotic Limbs Abstract Supernumerary robotic limbs are robotic structures integrated closely with the user’s body, which augment human physical capabilities and necessitate seamless, naturalistic human-machine interaction. For effective assistance in physical tasks, enabling SRLs to hand over objects to humans is crucial. Yet, designing heuristic-based policies for robots is time-consuming, difficult to generalize across […]
Posted: 12/02/2025
Under:







Recent Comments