
WRLKit
02Body Interaction, artin, ata, Featured Project, marie, Steimle
(UIST 2023)
Wearable robotic limbs (WRLs) augment human capabilities through robotic structures that attach to the user’s body.
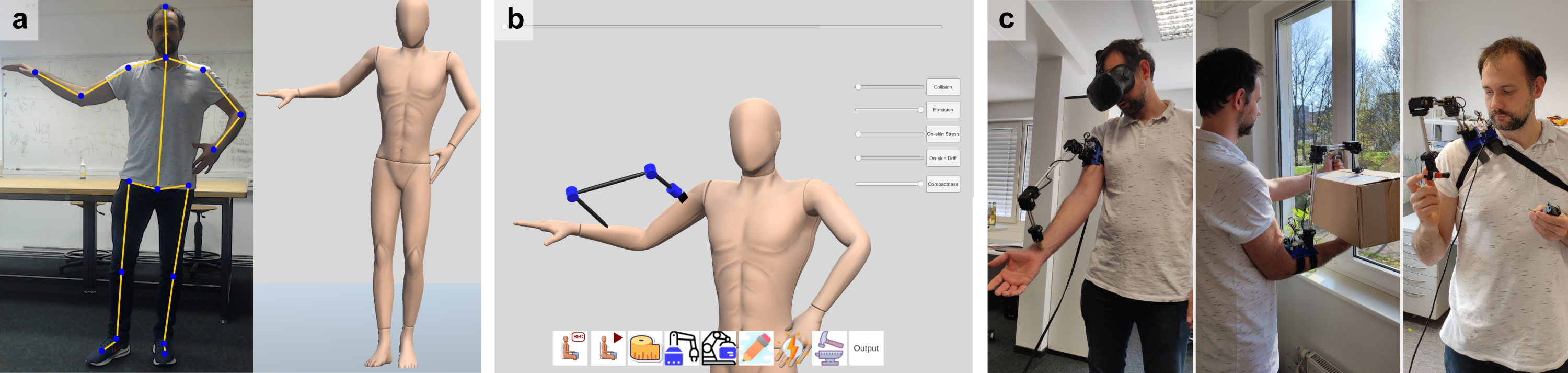
While WRLs are intensely researched and various device designs have been presented, it remains difficult for non-roboticists to engage with this exciting field. We aim to empower interaction designers and application domain experts to explore novel designs and applications by rapidly prototyping personalized WRLs that are customized for different tasks, different body locations, or different users. In this paper, we present WRLKit, an interactive computational design approach that enables designers to rapidly prototype a personalized WRL without requiring extensive robotics and ergonomics expertise. The body-aware optimization approach starts by capturing the user’s body dimensions and dynamic body poses. Then, an optimized fabricable structure of the WRL is generated for a desired mounting location and workspace of the WRL, to fit the user’s body and intended task.
The results of a user study and several implemented prototypes demonstrate the practical feasibility and versatility of WRLKit.
