HapticPipette
arata
(CHI 2026)
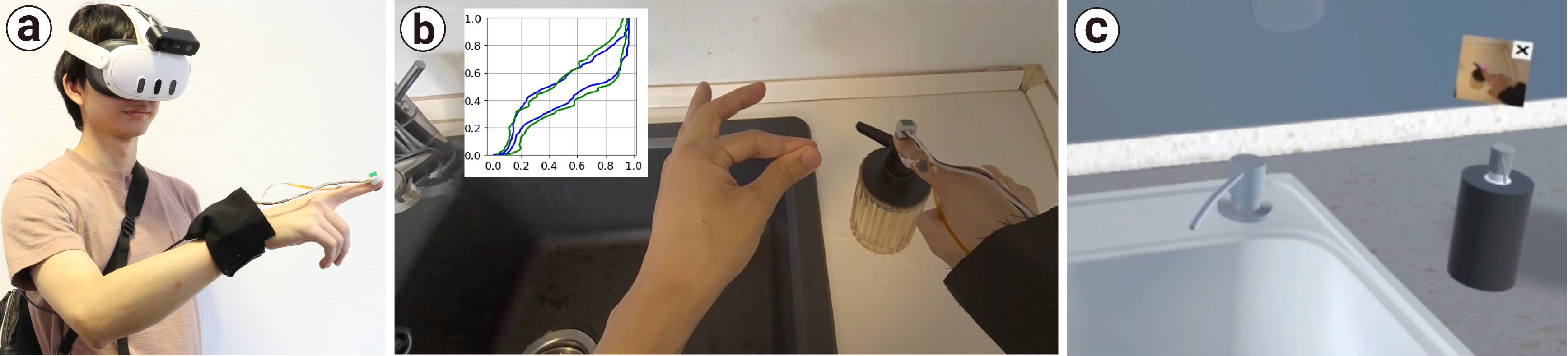
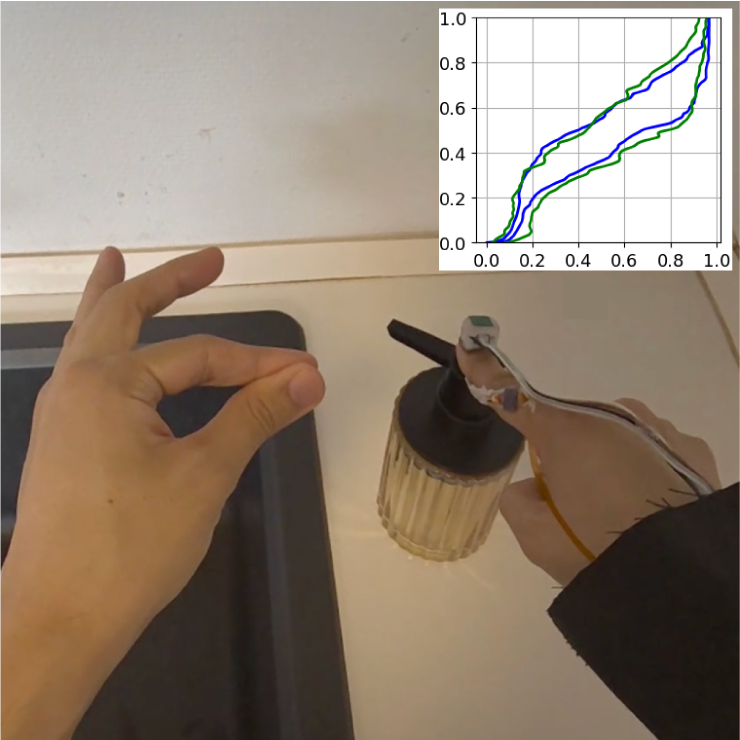
Haptic feedback is essential in creating immersive mixed-reality (MR) experiences. Yet, specifying the haptic properties of virtual objects remains challenging, particularly when capturing the nuanced, non-linear force-displacement behavior that contributes to perceived softness. We present HapticPipette, a technique for seamlessly capturing the complex force-displacement characteristics of physical objects in real-time MR experiences. We contribute a mobile and finger-worn setup that allows users to capture the haptic characteristics with familiar finger movements while freely moving inside a room in MR experiences. Results from two user studies confirm that HapticPipette accurately captures force-displacement curves of diverse soft materials and that users find HapticPipette easy to learn and perform. Three example applications demonstrate how HapticPipette seamlessly integrates haptic capture into MR workflows.
