Squish This
bruno, Paul
(CHI 2021)
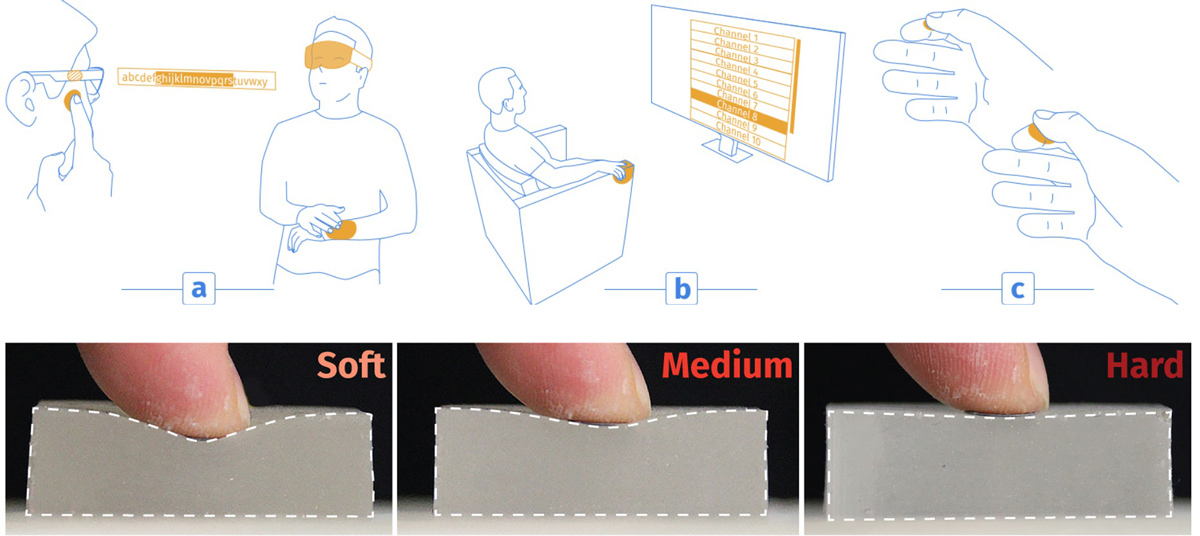
Today’s typical input device is flat, rigid and made of glass. However, advances in sensing technology and interaction design suggest thinking about input on other surface, including soft materials. While touching rigid and soft materials might feel similar, they clearly feel different when pressure is applied to them. Yet, to date, studies only investigated force input on rigid surfaces. We present a first systematic evaluation of the effects of compliance on force input. Results of a visual targeting task for three levels of softness indicate that high force levels appear more demanding for soft surfaces, but that performance is otherwise similar. Performance remained very high (5% for 20 force levels) regardless of the compliance, suggesting force input was underestimated so far. We infer implications for the design of force input on soft surfaces and conclude that interaction models used on rigid surfaces might be used on soft surfaces.
